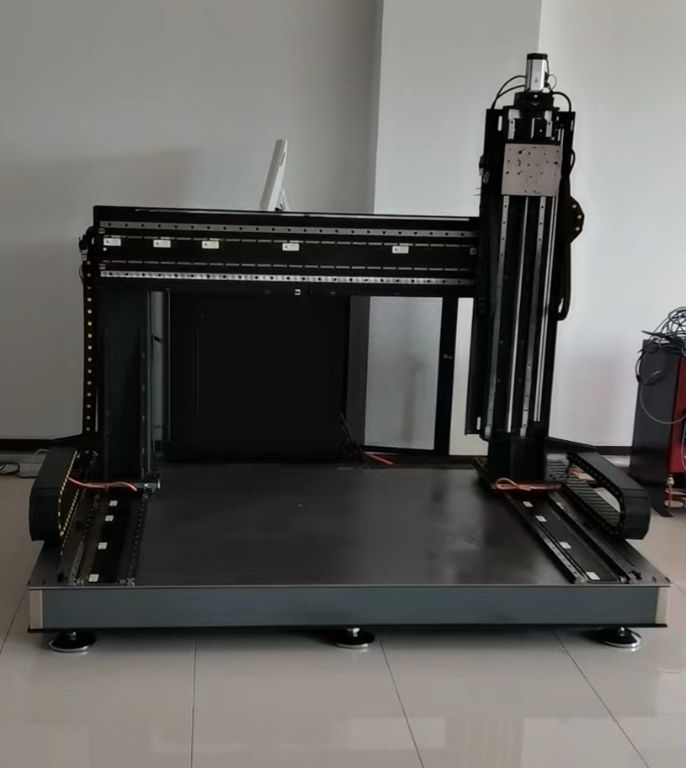
四自由度机器人试验运动平台
- 型号规格:DZLMA-4W-SYS-211101
- 仪器类别:分析仪器
- 仪器原值:41.2万元
- 所属单位:国家机器人创新中心
- 生产厂商:卓立汉光
- 产地国别:中国
- 启用日期:2022-10-13
- 仪器所在地区:沈阳市
- 仪器安放地址:沈阳市浑南新区创新路135号

浏览量:240

仪器服务信息
收费标准
技术指标
主要功能
服务内容
推荐仪器